Navigating the Factory Floor: A Technical Comparison of AGV and AMR
Abstract: This article provides an educational analysis of the fundamental differences between Automated Guided Vehicle (AGV) and Autonomous Mobile Robot (AMR) navigation technologies. By examining how each system utilizes its unique type of navigation references (mandatory for all self-guiding vehicles), this piece highlights their respective environmental vulnerabilities and their suitability for dynamic versus static industrial applications.
Introduction
When evaluating automated material transport for manufacturing and warehouse facilities, the primary differentiator between an Autonomous Mobile Robot (AMR) and an Automated Guided Vehicle (AGV) is not merely how they function, but how effectively they navigate within a specific environment. Navigation is the most critical factor for any guided vehicle system; without robust, reliable, and accurate navigation technology, the system cannot function. Regardless of the technology, every type of guided vehicle requires "navigation references” - fixed points or landmarks used to drive safely, determine precise positioning, and execute path actions. The vulnerability of these references directly dictates the reliability of the entire system.
AMR Navigation: Natural Feature Lidar or Vision Guidance
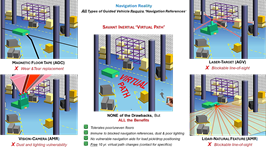
AMRs typically rely on "natural feature" navigation, utilizing Lidar (laser scanning) or Vision (camera) technologies. This method requires the AMR to scan and map existing building features, such as walls, columns, and racks, to establish a navigational framework.
While this approach offers flexibility in route planning, it presents significant technical challenges in dynamic industrial environments. In typical open-aisle factories and warehouses, the line-of-sight to these structural references is frequently blocked by moving objects like pallets, forklifts, carts, and personnel. Because AMR navigation heavily depends on continuous visibility of these mapped structures, any blockage or environmental change—such as variable lighting, poor/uneven floor conditions, or dust—can critically degrade navigation performance. As a result, the vehicle may randomly slow down, stop, or lose the positional accuracy required to perform automatic load transfers. Consequently, AMRs are generally recommended for highly static environments or applications where load transfers are performed manually.
AGV Navigation: Laser Target or Inertial Guidance
In contrast to AMRs and older tape-guided systems, modern AGVs, employ either “Laser target” or “Inertial” technologies.
Laser target technology necessitates installing reflective reference markers on walls, columns, etc. mounted at fixed elevation levels for line-of-sight needs, on both sides of the travel path.
Inertial navigation technology relies on a solid-state inertial sensor chip (similar to the chip found in smartphones for phone rotation sensing), to track a virtual CAD map stored directly in the vehicle's memory.
To maintain strict accuracy and zero-out any fraction of an inch inertial drift, the AGV uses passive, widely spaced, magnetic markers. Because these references are embedded flush in the floor, they are "bulletproof" against the vulnerabilities that plague AMRs; they cannot be blocked by off-aisle obstructions that create line-of-sight issues for AMR in active traffic facilities and are completely immune to lighting changes, dust, and humidity.
This reference stability allows inertial AGVs to consistently maintain sub-inch tracking accuracy. This precise positioning is a mandatory technical requirement for complex automated processes, such as unaided automatic load transferring, automatic charging, and tight integration with robotic machine cells and conveyors.
Conclusion
Selecting the appropriate automated vehicle hinges on the operational environment. While AMRs offer a modern approach suited for static layouts, the heavy reliance on natural feature visibility makes them vulnerable in busy, changing facilities. For dynamic factory and warehouse environments that require continuous uptime, precise automation interfaces, and high-throughput traffic control, the floor-protected reference strategy of Virtual Path AGV navigation provides a highly reliable and durable technical solution.
 Castings & Forgings
Castings & Forgings Bulk Material Handling
Bulk Material Handling Electrical & Electronic Components
Electrical & Electronic Components Flow Instrumentation
Flow Instrumentation Hardware
Hardware Material Handling Equipment
Material Handling Equipment Metal Cutting Services
Metal Cutting Services Metal Forming Services
Metal Forming Services Metal Suppliers
Metal Suppliers Motion Control Products
Motion Control Products Plant & Facility Equipment
Plant & Facility Equipment Plant & Facility Supplies
Plant & Facility Supplies Plastic Molding Processes
Plastic Molding Processes Pumps & Valves
Pumps & Valves Recycling Equipment
Recycling Equipment Rubber Products & Services
Rubber Products & Services